In the late 19th and early 20th centuries, physical models were widely used by mathematics educators to depict a wide range of mathematical ideas in three dimensions. Most models were constructed in Europe, in particular Germany, for use in school and college instruction. These models could be static or articulated (movable). They were used to show mathematical surfaces and curves as well as other mathematical concepts useful to mathematicians, engineers and scientists. As more and more American institutions added mathematical models to their collections, American firms grew up to supply this growing demand. By World War I interest in these physical models waned, and most were relegated to closets and basements. But with the advent of computer graphics systems, the interest in physical mathematical models is returning.
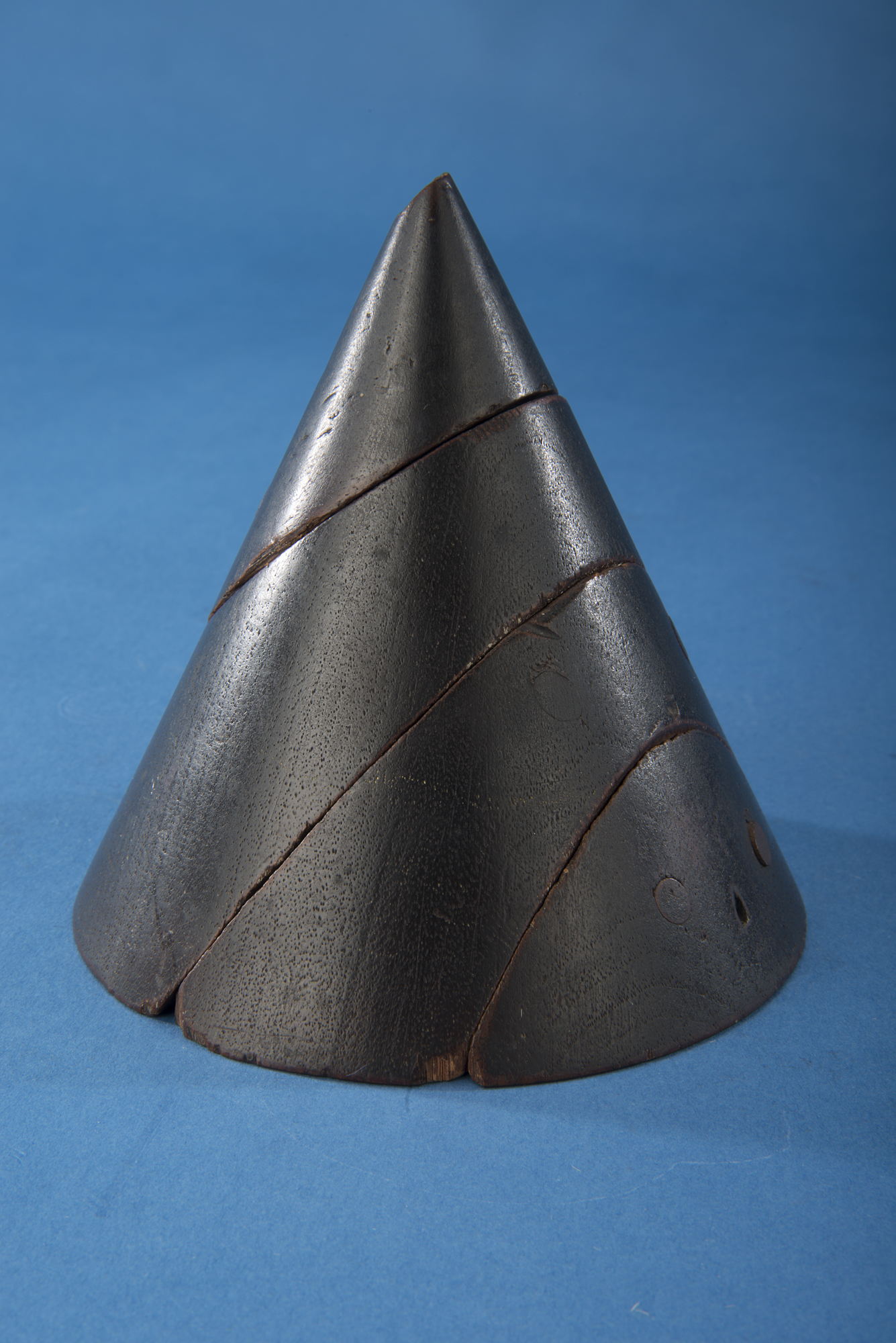 |
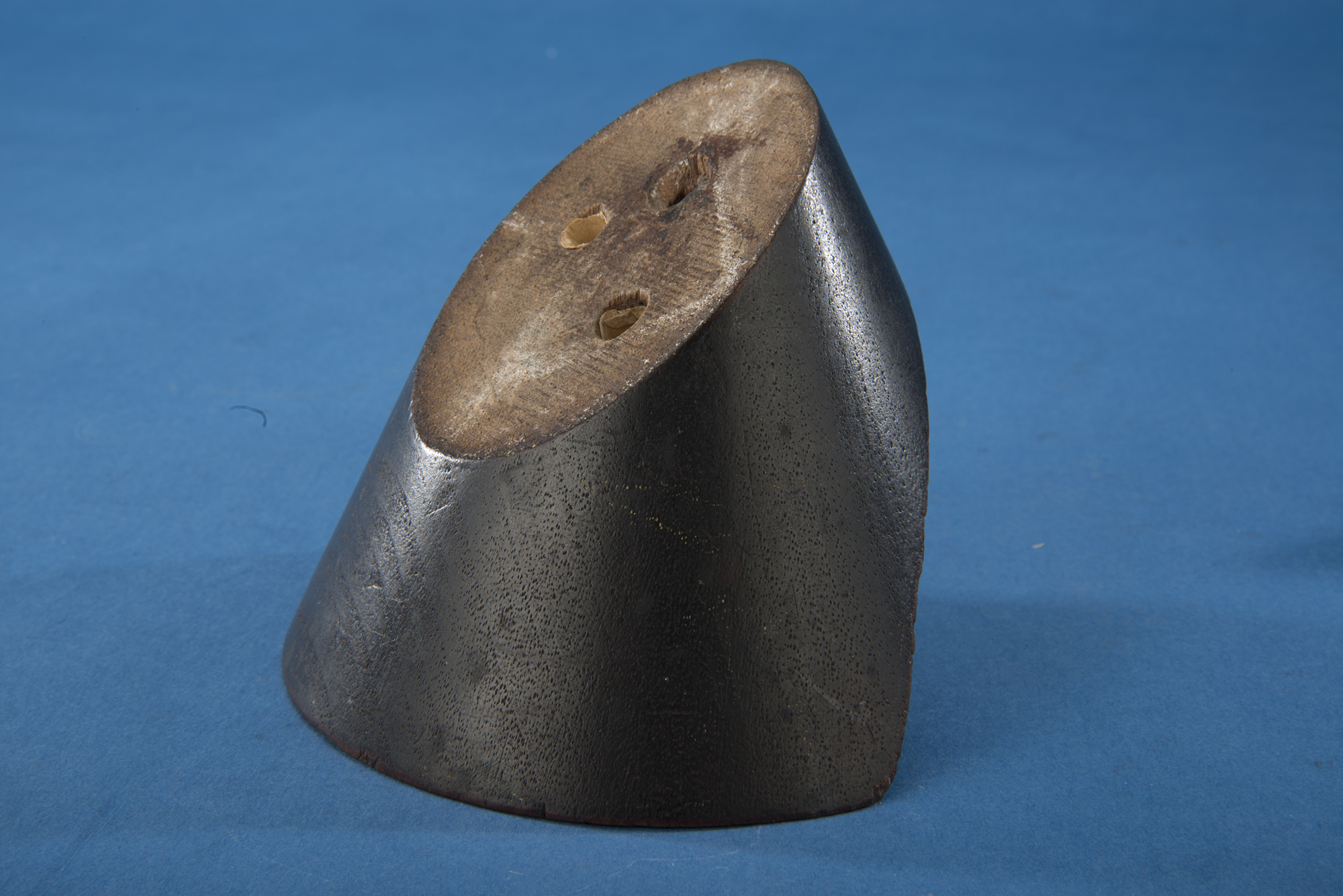
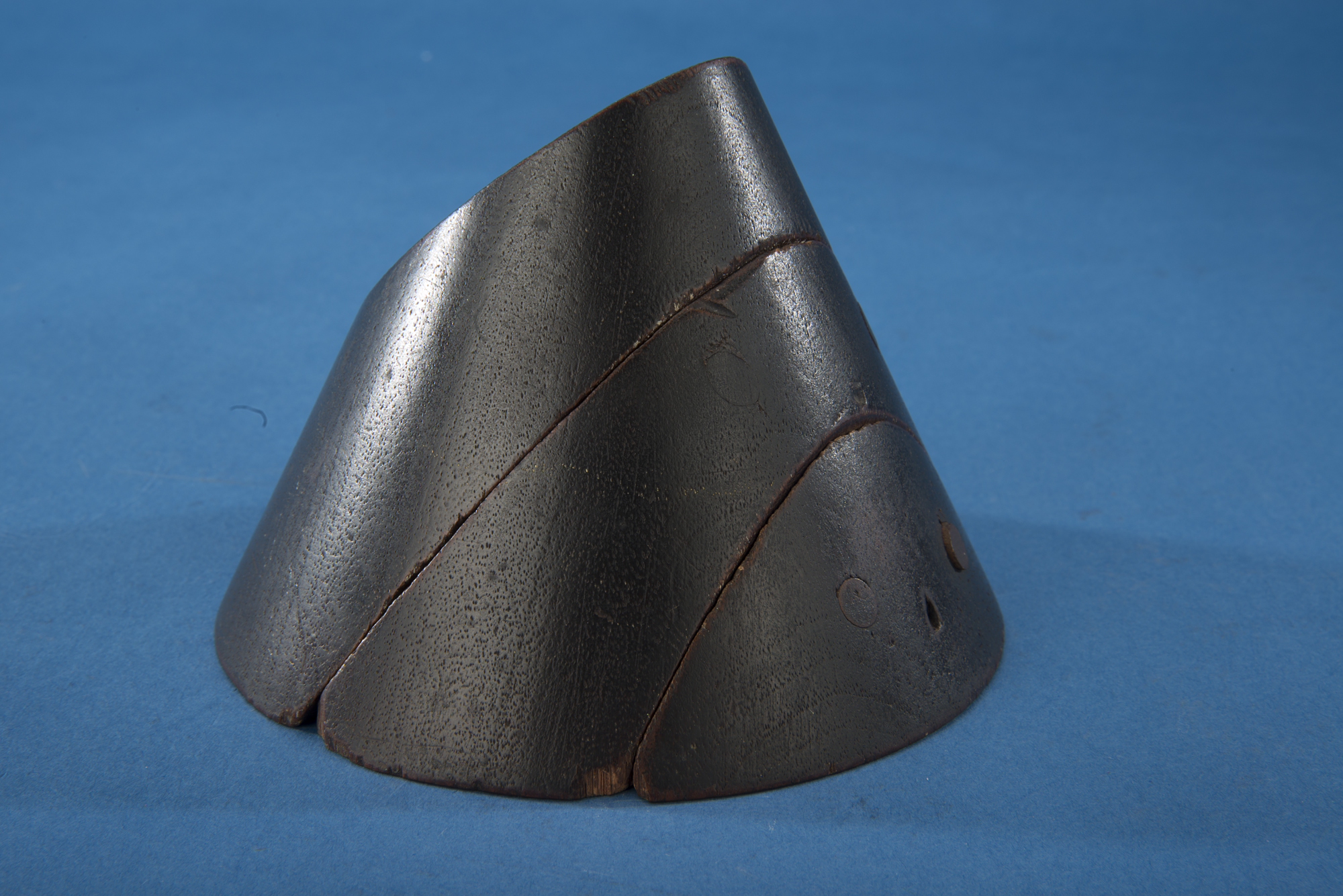
| Conic Section Model, ca 1900. Object 1979.3002.021, Smithsonian Image DOR2013-17883. |
The vast majority of mathematical models made around the turn of the 20th century were static (not able to be manipulated) and made of wood, paper or plaster. The paper models of American mathematician A. Harold Wheeler are a prime example. A common model still used in many high schools is the wooden or plaster cone used to show how the conic sections (circle, ellipse, parabola, hyperbola) arise from slicing a cone at different angles to its axis.
Less common are kinematic models. These devices depict mathematical concepts that involve motion. The models can be manipulated through the use of cranks and hinges and were usually constructed of metal, most often brass.
The most widely used kinematic model of the time was the linkage. A linkage is a device made of hinged armatures linked at pivot points to allow the whole assembly to move and deform in order to transform one type of movement into another. The most common and useful linkages are those that transform circular movement into linear movement, known as inversors. Circular motion is easy to produce using any sort of wheel device. However, true linear or straight line motion is not. To create linear motion, the circular motion of a crankshaft needs to be transformed into straight line motion. A common example of the conversion between linear and rotary motion is found in internal combustion engines. The piston’s linear motion is converted into the rotary motion of the crank shaft, which is in turn transmitted to the wheels. In 1784, Scottish engineer James Watt developed a system of rods and pins that allowed the pistons in his steam engines to exert force on both the downward and upward stroke of the piston (as opposed to in just one direction as in previous designs). This led to many advances in engineering. However, Watt’s design did not create exact linear motion. Along with straight line motion, linkages can generate oscillating motion from circular motion, again useful in engineering.
The second types of kinematic models are those that generate curves, which are used in diverse theoretical and engineering processes. Starting in the 17th century, one of the most studied types of curves has been the trochoids; curves that are generated by tracing the motion of a point on the radius of a circle as it rolls along another curve. Included in the family of trochoids are the cycloids (a circle rolling along a straight line), epitrochoids (a circle rolling around the outside of another circle) and the hypotrochoids (a circle rolling around the inside of another circle). The popular Spirograph drawing toy produces various trochiods.
 |
| The Spirograph toy produced by Hasbro was created by British engineerDenys Fisherand first sold in 1965 (object 2005.0055.02) |
These types of curves have applications in engineering with respect to the workings of gears and motors, as well as answer interesting questions in mathematics, physics and engineering. In particular, gear teeth shaped using cycloidal and involute curves reduce friction and torque, allowing gears to rotate more efficiently.
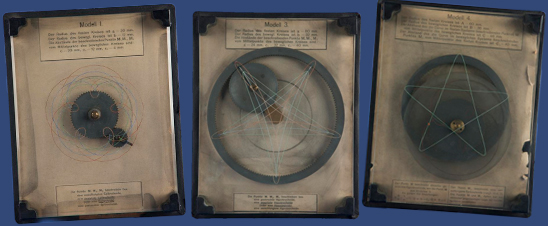
During the second half of the 19th century, mathematical models for use in teaching became very popular. One of the most prominent producers (known as publishers) of models for commercial use was the firm of Ludwig Brill of Darmstadt, Germany. In 1899 Martin Schilling took over and expanded the business from Brill. The kinematic models in the Smithsonian’s collection housed at the National Museum of American History were produced by the firm of Martin Schilling. His firm produced numerous types of mathematical models, including twelve kinematic models of which the Smithsonian presently has ten. Originally located in Halle, Germany, the firm moved to Leipzig sometime after 1903. The kinematic models were designed by German mathematician Frederick Schilling (1868—1950), professor of mathematics at Göttingen, who became the scientific director of the company. The kinematic models are listed in the 1911 Schilling Catalog mathematischer Modelle, Leipzig. This catalog lists 377 items divided into forty series or types of models. Series XXIV consists of Kinematic models (Kinematische Modelle), models of movement. This series is divided into 4 groups:
Group 1 (models No 1-4): Trochiods (Epitrochoid and Hypotrochoid)
Group 2 (models No 5-7); Cyclic curves (including cycloids)
Group 3 (models No 8, 9): Twin cranks
Group 4 (models No 10-12): Inversors by Peaucellier, Hart, and Sylverster and Kempe
All of the Schilling models in the NMAH collection, with the exception of the Peaucellier Inversor, were given to the Smithsonian by the University of Michigan’s Department of Mathematics in 1964.The Peaucellier Inversor came to the museum from Brown University in 1973.





Our collection database is a work in progress. We may update this record based on further research and review. Learn more about our approach to sharing our collection online.
If you would like to know how you can use content on this page, see the Smithsonian's Terms of Use. If you need to request an image for publication or other use, please visit Rights and Reproductions.